A big thank you to Simon Harbord for pointing me in the direction of this lovely Posographe. He had shown images of his on Facebook last year and I had been on the look out for one since. Plenty of Cine ones come up on ebay but not so many photographic ones. This is a Kaufmann Posographe, yes its in French but I can work it out.
It measures about 8×13 cm, double sided gloss panels with seven sliding pointers around the frame. These are all cleverly interconnected. As you move the smaller ones the larger one slides along its scale. So it is a six variable computer… of sorts.

From Nathan Zeldes excellent website…
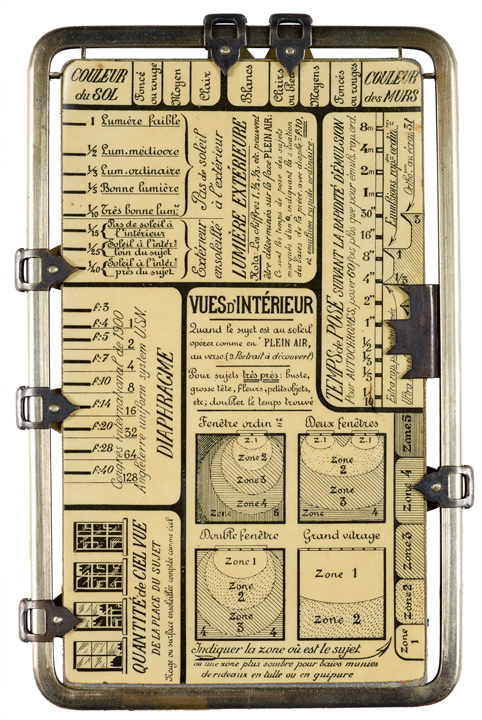
“Kaufmann’s Posographe is nothing less than an analog mechanical computer for calculating six-variable functions. Specifically, it computes the exposure time (Temps de Pose) for taking photographs indoors or out (depending on which side you use). The input variables are set up on the six small pointers; the large pointer then gives you the correct time. The variables are very detailed, yet endearingly colloquial. For outdoors, they include the setting — with values like “Snowy scene”, “Greenery with expanse of water”, or “Very narrow old street”; the state of the sky — including “Cloudy and somber”, “Blue with white clouds”, or “Purest blue”; The month of the year and hour of the day; the illumination of the subject; and of course the aperture (f-number).
For indoor photos, we have the colors of the walls and floor; the location of the subject relative to the windows (depending also on the number of windows, and indicated by the little diagrams); the extent of sky in the window, as seen from the location of the subject (again illustrated in little pictures); the sunlight level outside, and how much of it, if any, enters the room; and the aperture.
The output indicator actually has four points, designed to show the respective exposure times for different emulsion types.”

“The diagram, from the instruction manual, shows how the many pointers are all interconnected in just the right way to provide the appropriate computation. One wonders whether M. Kaufmann achieved this design empirically by trial and error, or by working out the math (my bet would be a combination of both)”

This one came with its original case.

Thanks Simon.
1 Response
[…] Whats the difference between a camera and a sock? […]